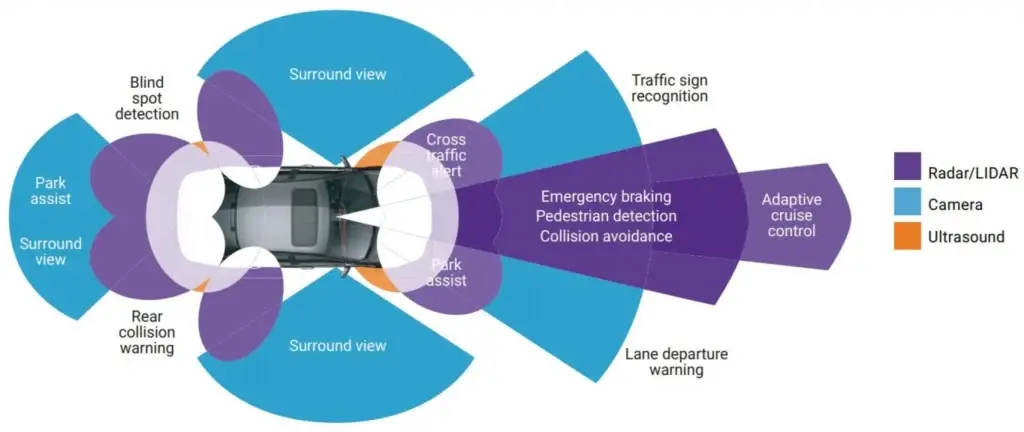
Sensor Testing Image: edge-ai-vision Radar Testing Evaluates the performance and accuracy of radar sensors used for functions like adaptive cruise control and collision avoidance. Lidar Testing Assesses the effectiveness of lidar sensors in detecting obstacles, pedestrians, and other vehicles. Camera Testing Validates the performance of cameras for lane departure warning, traffic sign recognition, and object detection. Ultrasonic Sensor Testing Verifies the functionality of ultrasonic sensors used for parking assistance and proximity detection.